
उत्पाद श्रेणी
- एफएम ट्रांसमीटर
- 0-50w 50w-1000w 2kw-10kw 10kw +
- टीवी ट्रांसमीटर
- 0-50w 50-1kw 2kw-10kw
- एफएम एंटीना
- टीवी एंटीना
- एंटीना गौण
- केबल योजक पावर अलगानेवाला डमी भार
- आरएफ ट्रांजिस्टर
- बिजली की आपूर्ति
- ऑडियो उपकरण
- DTV फ्रंट एंड उपकरण
- लिंक सिस्टम
- एसटीएल प्रणाली माइक्रोवेव लिंक प्रणाली
- एफएम रेडियो
- बिजली मीटर
- अन्य उत्पाद
- कोरोनावायरस के लिए विशेष
उत्पाद टैग
Fmuser साइटें
- es.fmuser.net
- it.fmuser.net
- fr.fmuser.net
- de.fmuser.net
- af.fmuser.net -> अफ्रीकी
- sq.fmuser.net -> अल्बानियाई
- ar.fmuser.net -> अरबी
- hy.fmuser.net -> अर्मेनियाई
- az.fmuser.net -> अजरबैजानी
- eu.fmuser.net -> बास्क
- be.fmuser.net -> बेलारूसी
- bg.fmuser.net -> बल्गेरियाई
- ca.fmuser.net -> कातालान
- zh-CN.fmuser.net -> चीनी (सरलीकृत)
- zh-TW.fmuser.net -> चीनी (पारंपरिक)
- hr.fmuser.net -> क्रोएशियाई
- cs.fmuser.net -> चेक
- da.fmuser.net -> डेनिश
- nl.fmuser.net -> डच
- et.fmuser.net -> एस्टोनियाई
- tl.fmuser.net -> फिलिपिनो
- fi.fmuser.net -> फिनिश
- fr.fmuser.net -> फ्रेंच
- gl.fmuser.net -> गैलिशियन्
- ka.fmuser.net -> जॉर्जियाई
- de.fmuser.net -> जर्मन
- el.fmuser.net -> यूनानी
- ht.fmuser.net -> हाईटियन क्रियोल
- iw.fmuser.net -> हिब्रू
- hi.fmuser.net -> हिन्दी
- hu.fmuser.net -> हंगेरी
- is.fmuser.net -> आइसलैंड का
- id.fmuser.net -> इन्डोनेशियाई
- ga.fmuser.net -> आयरिश
- it.fmuser.net -> इतालवी
- ja.fmuser.net -> जापानी
- ko.fmuser.net -> कोरियाई
- lv.fmuser.net -> लातवियाई
- lt.fmuser.net -> लिथुआनियाई
- mk.fmuser.net -> मकदूनियाई
- ms.fmuser.net -> मलय
- mt.fmuser.net -> माल्टीज
- no.fmuser.net -> नार्वेजियन
- fa.fmuser.net -> फारसी
- pl.fmuser.net -> पॉलिश
- pt.fmuser.net -> पुर्तगाली
- ro.fmuser.net -> रोमानियाई
- ru.fmuser.net -> रूसी
- sr.fmuser.net -> सर्बियाई
- sk.fmuser.net -> स्लोवाक
- sl.fmuser.net -> स्लोवेनियाई
- es.fmuser.net -> स्पेनिश
- sw.fmuser.net -> स्वाहिली
- sv.fmuser.net -> स्वीडिश
- th.fmuser.net -> थाई
- tr.fmuser.net -> तुर्की
- uk.fmuser.net -> यूक्रेनी
- ur.fmuser.net -> उर्दू
- vi.fmuser.net -> वियतनामी
- cy.fmuser.net -> वेल्श
- yi.fmuser.net -> येहुदी
फेज़ मॉड्यूलेशन: थ्योरी, टाइम डोमेन, फ़्रीक्वेंसी डोमेन
रेडियो फ्रीक्वेंसी मॉड्यूलेशन
चरण मॉडुलन आवृत्ति मॉड्यूलेशन के समान है और डिजिटल संचार प्रणालियों में एक महत्वपूर्ण तकनीक है।
हम सभी ने एएम रेडियो और एफएम रेडियो के बारे में सुना है। लेकिन चरण मॉड्यूलेशन एक अलग श्रेणी में लगता है- "पीएम रेडियो" कोई सामान्य शब्द नहीं है। यह पता चलता है कि डिजिटल आरएफ के संदर्भ में चरण मॉडुलन अधिक प्रासंगिक है।
एक तरह से, हालांकि, हम कह सकते हैं कि पीएम रेडियो केवल एफएम रेडियो के रूप में आम है क्योंकि चरण मॉड्यूलेशन और आवृत्ति मॉड्यूलेशन के बीच बहुत कम अंतर है। FM और PM को कोण मॉड्यूलेशन के दो निकटता से संबंधित वेरिएंट के रूप में माना जाता है, जहां "कोण" एक साइन या कोसाइन फ़ंक्शन को दी गई मात्रा के संशोधन को संदर्भित करता है।
गणित
हमने पिछले पृष्ठ में देखा कि साइन या कोसाइन फंक्शन (जहां साइन या कोसाइन फंक्शन वाहक का प्रतिनिधित्व करता है) के तर्क को बेसबैंड सिग्नल के अभिन्न जोड़कर आवृत्ति मॉड्यूलेशन प्राप्त किया जाता है:
फ़्रीक्वेंसी मॉड्यूलेशन के साथ, हम बेसबैंड वैल्यू में बदलाव के लिए चरण भिन्नताओं को अधिक संवेदनशील बनाने के लिए मॉड्यूलेशन इंडेक्स का उपयोग कर सकते हैं:
यदि हम एकल-आवृत्ति बेसबैंड सिग्नल पर विचार करते हैं, तो चरण मॉड्यूलेशन और फ़्रीक्वेंसी मॉड्यूलेशन के बीच समानता स्पष्ट हो जाती है। मान लीजिए कि xBB (t) = sin (tBBt)।
साइन का अभिन्न नकारात्मक कोसाइन है (साथ ही एक स्थिर, जिसे हम यहां अनदेखा कर सकते हैं) - दूसरे शब्दों में, अभिन्न मूल सिग्नल का केवल एक समय-स्थानांतरित संस्करण है।
इस प्रकार, यदि हम इस बेसबैंड सिग्नल के साथ फेज़ मॉड्यूलेशन और फ़्रीक्वेंसी मॉड्यूलेशन करते हैं, तो मॉड्यूलेटेड वेवफॉर्म में एकमात्र अंतर बेसबैंड वैल्यू और कैरियर में भिन्नताओं के बीच संरेखण होगा; विविधताएं स्वयं समान हैं। यह अगले भाग में अधिक स्पष्ट होगा, जहां हम कुछ समय-डोमेन भूखंडों को देखेंगे।
यह ध्यान रखना महत्वपूर्ण है कि हम तात्कालिक चरण के साथ काम कर रहे हैं, जैसे कि आवृत्ति मॉडुलन तात्कालिक आवृत्ति की अवधारणा पर आधारित है। शब्द "चरण" बल्कि अस्पष्ट है। एक परिचित अर्थ एक साइनसोइड की प्रारंभिक अवस्था को संदर्भित करता है; उदाहरण के लिए, एक "सामान्य" साइन लहर शून्य के मूल्य से शुरू होती है और फिर इसके अधिकतम मूल्य की ओर बढ़ती है। एक साइन लहर जो अपने चक्र में एक अलग बिंदु पर शुरू होती है, में एक चरण ऑफसेट होता है। हम एक पूर्ण तरंग चक्र के विशिष्ट भाग के रूप में भी चरण के बारे में सोच सकते हैं; उदाहरण के लिए, π / 2 के चरण में, एक साइनसॉइड ने अपने चक्र का एक-चौथाई पूरा कर लिया है।
"चरण" की ये व्याख्याएं हमें बहुत मदद नहीं करती हैं जब हम एक चरण के साथ काम कर रहे होते हैं जो लगातार बेसबैंड तरंग के जवाब में बदलता रहता है। बल्कि, हम तात्कालिक चरण की अवधारणा का उपयोग करते हैं, अर्थात, एक निश्चित समय पर चरण, जो एक त्रिकोणमितीय फ़ंक्शन को दिए गए मान (किसी दिए गए क्षण पर) से मेल खाती है। हम तात्कालिक चरण में इन निरंतर बदलावों के बारे में सोच सकते हैं, जैसे कि वेवफॉर्म के पूर्ववर्ती स्थिति से वाहक मूल्य को आगे या पीछे धकेलना।
एक और बात ध्यान रखें: साइन और कोसाइन सहित त्रिगुण कार्य, कोणों पर कार्य करते हैं। ट्रिगर फ़ंक्शन के तर्क को बदलना कोण को बदलने के बराबर है, और यह बताता है कि क्यों एफएम और पीएम दोनों को कोण मॉडुलन के रूप में वर्णित किया गया है।
टाइम डोमेन
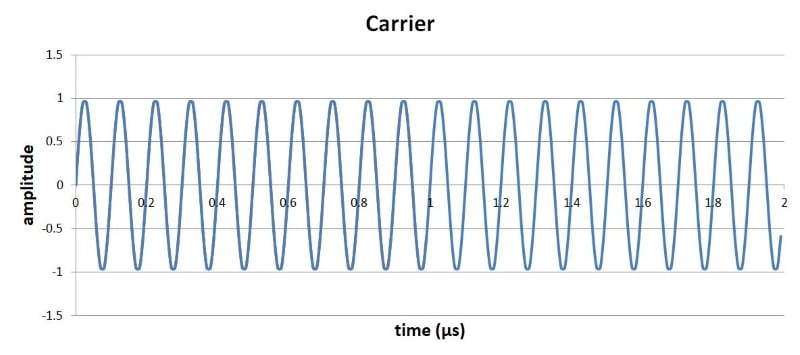
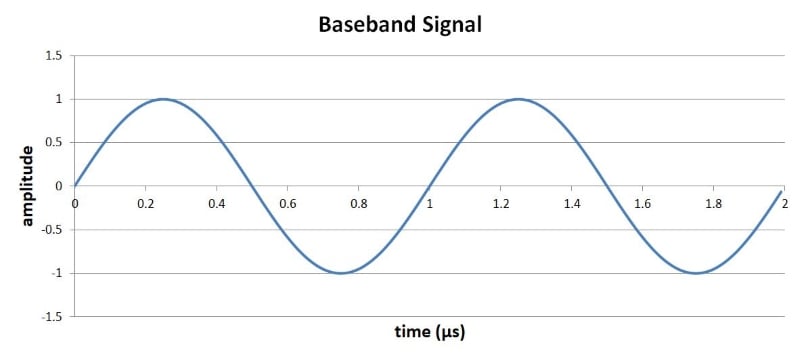
हम उन्हीं तरंगों का उपयोग करेंगे जिनका उपयोग हमने FM चर्चा के लिए किया है, अर्थात, एक 10 मेगाहर्ट्ज वाहक और 1 MHz साइनसॉइडल बेसबैंड सिग्नल:
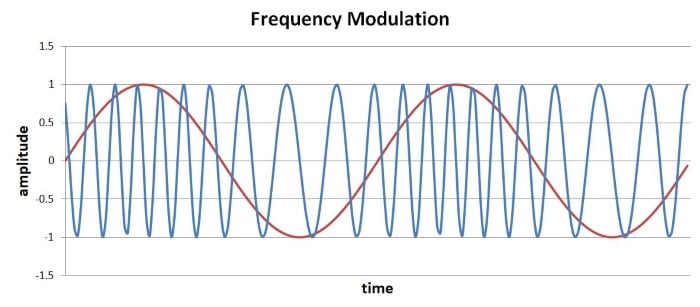
यहाँ एफएम तरंग (m = 4 के साथ) है जो हमने पिछले पृष्ठ में देखा था:
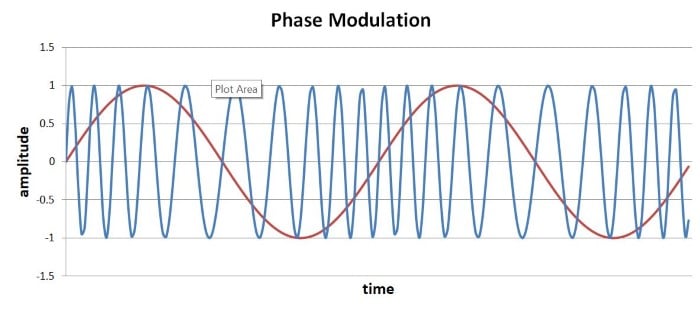
हम निम्नलिखित समीकरण का उपयोग करके पीएम तरंग की गणना कर सकते हैं, जहां वाहक तरंग के तर्क में जोड़ा गया संकेत नकारात्मक कोसाइन (यानी, मूल संकेत के अभिन्न) के बजाय सकारात्मक साइन (यानी, मूल संकेत) का उपयोग करता है।

ये है पीएम की साजिश:
इससे पहले कि हम इस पर चर्चा करें, आइए एक ऐसे प्लॉट पर भी नज़र डालें जो एफएम तरंग और पीएम तरंग को दर्शाता है:
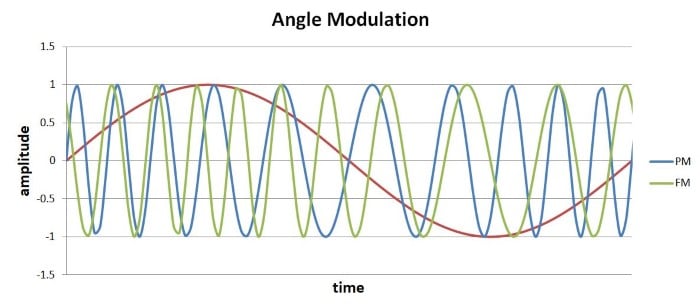
पहली बात जो यहाँ ध्यान में आती है, वह यह है कि एक दृश्य की दृष्टि से, FM, PM की तुलना में अधिक सहज ज्ञान युक्त है - संग्राहक तरंग के उच्च और निम्न-आवृत्ति वर्गों और उच्च और निम्न बेसबैंड मूल्यों के बीच एक स्पष्ट दृश्य संबंध है।
पीएम के साथ, बेसबैंड तरंग और वाहक के व्यवहार के बीच संबंध शायद तुरंत स्पष्ट नहीं है। हालांकि, थोड़ा निरीक्षण के बाद हम देख सकते हैं कि पीएम वाहक आवृत्ति बेसबैंड तरंग के ढलान से मेल खाती है; उच्चतम आवृत्ति वाले खंड xBB के सबसे धनात्मक धनात्मक ढलान के दौरान होते हैं, और सबसे कम आवृत्ति वाले खंड सबसे अधिक नकारात्मक ढलान के दौरान होते हैं।
यह समझ में आता है: उस आवृत्ति को याद करें (समय के एक कार्य के रूप में) चरण का व्युत्पन्न है (समय के एक समारोह के रूप में)। चरण मॉड्यूलेशन के साथ, बेसबैंड सिग्नल का ढलान नियंत्रित करता है कि चरण कितनी जल्दी बदलता है, और जिस चरण में चरण बदलता है वह आवृत्ति के बराबर है।
तो एक पीएम तरंग में, उच्च बेसबैंड ढलान उच्च आवृत्ति से मेल खाती है, और कम बेसबैंड ढलान कम आवृत्ति से मेल खाती है। आवृत्ति मॉड्यूलेशन के साथ, हम xBB के अभिन्न का उपयोग करते हैं, जिसमें बेसबैंड वैल्यू के उच्च- (या निम्न-) ढलान भागों के बाद बेसबैंड वैल्यू में उच्च- (या निम्न-) आवृत्ति वाहक खंडों को शिफ्ट करने का प्रभाव होता है।
फ्रीक्वेंसी डोमेन
पूर्ववर्ती समय-डोमेन भूखंड प्रदर्शित करते हैं जो पहले कहा गया था: आवृत्ति मॉड्यूलेशन और चरण मॉडुलन काफी समान हैं। यह आश्चर्य की बात नहीं है कि, आवृत्ति डोमेन में पीएम का प्रभाव एफएम के समान है। यहाँ ऊपर इस्तेमाल किए गए वाहक और बेसबैंड सिग्नल के साथ चरण मॉड्यूलेशन के लिए स्पेक्ट्रा हैं:
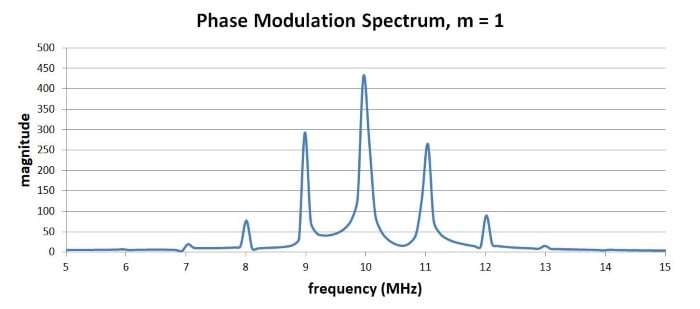
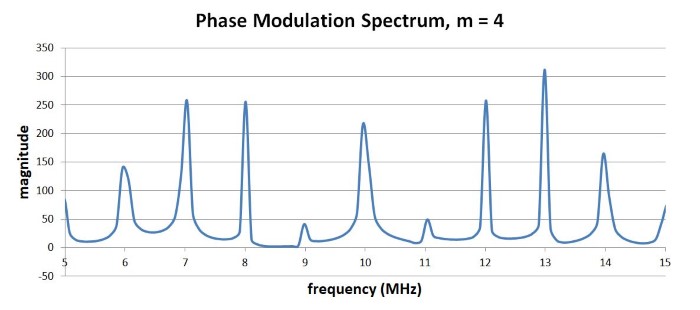
* चरण मॉडुलन की गणना एक साइन या कोसाइन फ़ंक्शन के तर्क के लिए बेसबैंड सिग्नल को जोड़कर की जाती है जो वाहक का प्रतिनिधित्व करता है।
* मॉड्यूलेशन इंडेक्स बेसबैंड सिग्नल के व्यवहार के चरण परिवर्तन को कम या ज्यादा संवेदनशील बनाता है।
* फेज़ मॉड्यूलेशन के फ्रीक्वेंसी-डोमेन इफेक्ट्स फ्रिक्वेंसी मॉड्यूलेशन के समान होते हैं।
* एनालॉग चरण मॉडुलन आम नहीं है; हालाँकि, डिजिटल चरण मॉड्यूलेशन का व्यापक रूप से उपयोग किया जाता है।
